Curvilinear Motion
General Curvilinear Motion
Curvilinear motion is defined as motion that occurs when a particle travels along a curved path. The curved path can be in two dimensions (in a plane), or in three dimensions. This type of motion is more complex than rectilinear (straight-line) motion.
Three-dimensional curvilinear motion describes the most general case of motion for a particle.
To find the velocity and acceleration of a particle experiencing curvilinear motion one only needs to know the position of the particle as a function of time.
Let’s say we are given the position of a particle P in three-dimensional Cartesian (x,y,z) coordinates, with respect to time, where
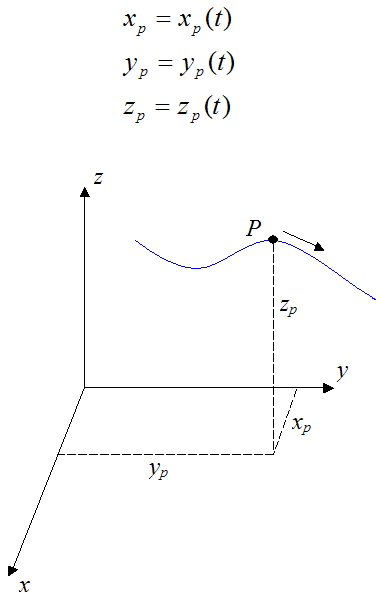
The velocity of the particle P is given by

The acceleration of the particle P is given by

As you can see, if we know the position of a particle as a function of time, it is a fairly simple exercise to find the velocity and acceleration. You simply take the first derivative to find the velocity and the second derivative to find the acceleration.
The magnitude of the velocity of particle P is given by
The magnitude of the acceleration of particle P is given by
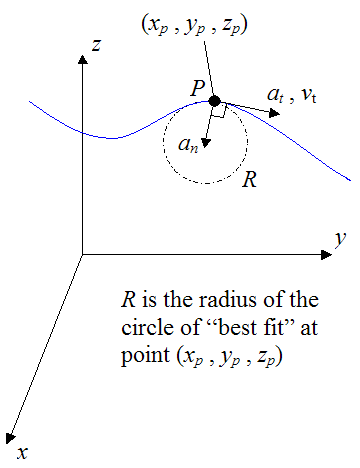
Note that the direction of velocity of the particle P is always tangent to the curve (i.e. the path traveled, denoted by the blue curve in the figure above). But the direction of acceleration is generally not tangent to the curve.
However, the acceleration component tangent to the curve is equal to the time derivative of the magnitude of velocity of the particle P (along the curve). In other words, if vt is the magnitude of the particle velocity (tangent to the curve), the acceleration component of the particle tangent to the curve (at) is simply
In addition, the acceleration component normal to the curve (an) is given by
where R is the radius of curvature of the curve at a given point on the curve (xp,yp,zp).
The figure below illustrates the acceleration components at and an at a given point on the curve (xp,yp,zp).
For the specific case where the path of the blue curve is given by y = f(x) (two-dimensional motion), the radius of curvature R is given by
where |x| means the “absolute value” of x. For example, |-2.5| = 2.5, and |3.1| = 3.1.
However, it is usually not necessary to know the radius of curvature R along a curve. But nonetheless, it is informative to understand it on the basis of its relationship to the normal acceleration (an).
Curvilinear Motion In Polar Coordinates
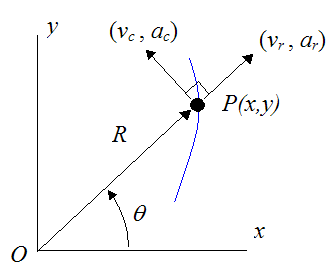
It is sometimes convenient to express the planar (two-dimensional) motion of a particle in terms of polar coordinates (R,θ), so that we can explicitly determine the velocity and acceleration of the particle in the radial (R-direction) and circumferential (θ-direction). For this type of motion, a particle is only allowed to move along the radial R-direction for a given angle θ.
For a particle P defined in polar coordinates (as shown below), we can derive a general equation for its radial velocity (vr), radial acceleration (ar), circumferential velocity (vc), and circumferential acceleration (ac).
Note that the circumferential direction is perpendicular to the radial direction.
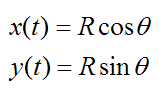
The position of the particle P is given with respect to time, where
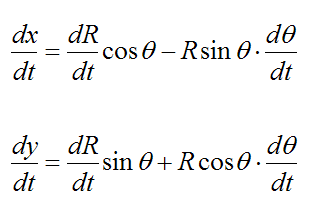
To find the velocity, take the first derivative of x(t) and y(t) with respect to time:
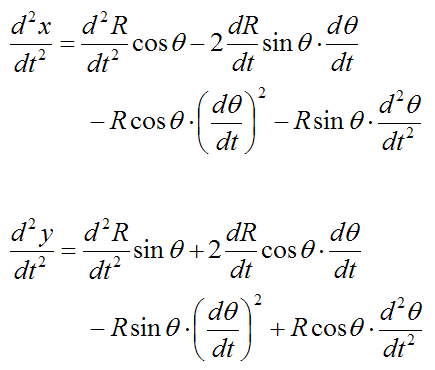
To find the acceleration, take the second derivative of x(t) and y(t) with respect to time:
Without loss of generality we can evaluate the velocities and accelerations at angle θ = 0, knowing that (at this angle) radial velocity and radial acceleration is in the x-direction, and circumferential velocity and circumferential acceleration is in the y-direction.
Setting θ = 0 we have:


Equations (1), (2), (3), and (4) fully describe the curvilinear motion of a particle P in polar coordinates.
The term dθ/dt is called angular velocity. It has units of rad/s. One rad (radian) = 57.296 degrees.
The term d2θ/dt2 is called angular acceleration. It has units of rad/s2.
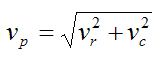
Since vr and vc are perpendicular to each other, the magnitude of the velocity of particle P is given by
Since ar and ac are perpendicular to each other, the magnitude of the acceleration of particle P is given by
Example Problem For Curvilinear Motion
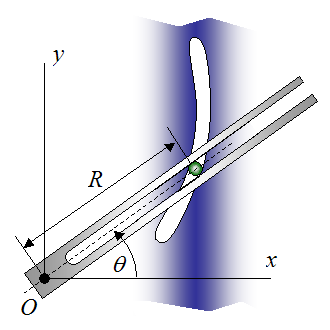
A slotted link is rotating about fixed pivot O with a counterclockwise angular velocity of 3 rad/s, and a clockwise angular acceleration of 2 rad/s2. The movement of the link is causing a rod to slide along the curved channel, as shown. The radius of the channel as a function of θ is given by, R = 0.7θ (with R in meters and θ in radians). Determine the velocity and acceleration components of the rod at θ = 45°
Solution
The angle θ = 45° is equal to π/4 radians. In the equations, counterclockwise angular velocity is positive, and clockwise angular acceleration is negative (since it acts to “slow down” the rotational speed of the link).
The radial velocity of the rod is given by equation (1):
(The radial velocity is in the direction of increasing R).
The circumferential velocity of the rod is given by equation (3):
(The circumferential velocity is in the direction of increasing θ).
The radial acceleration of the rod is given by equation (2):
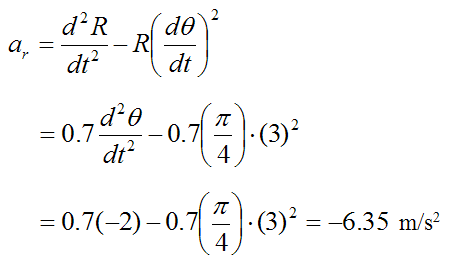
(The radial acceleration is in the direction of decreasing R).
The circumferential acceleration of the rod is given by equation (4):
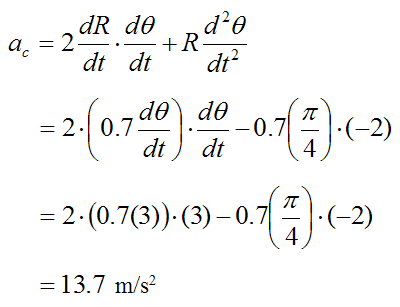
(The circumferential acceleration is in the direction of increasing θ).
Return to Kinematics page
Return to Real World Physics Problems home page
Free Newsletter
Subscribe to my free newsletter below. In it I explore physics ideas that seem like science fiction but could become reality in the distant future. I develop these ideas with the help of AI. I will send it out a few times a month.