Rolling
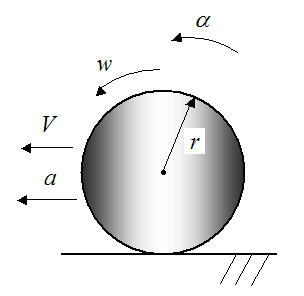
Pure Rolling Without SlippingConsider a wheel that rolls on a surface, without slipping, as shown below.
Where:
α is the angular acceleration of the wheel, in radians/s2
w is the angular velocity of the wheel, in radians/s
r is the radius of the wheel
V is the linear velocity of the geometric center of the wheel
a is the linear acceleration of the geometric center of the wheel
Thus,
Rolling With Slipping
In the case of rolling with relative slipping, there is relative sliding at the contact between wheel and surface. This means that
Dynamics problems that involve rolling with relative slipping are more complicated than problems that involve pure rolling. This is because you have to account for the direction of slip in order to determine the direction of (kinetic) friction, at the contact surface. To see an example of a solved problem that involves rolling with relative slipping, see The Physics Of Billiards. Scroll down near the end of the page to the section entitled: "A Closer Look At Relative Slipping". In this section, general equations are given for rolling with relative slipping, on a flat surface. It is useful to study this section, and then use the results for similar problems that you run into.
Return to Useful Physics Formulas page
Return to Real World Physics Problems home page
Free Newsletter
Subscribe to my free newsletter below. In it I explore physics ideas that seem like science fiction but could become reality in the distant future. I develop these ideas with the help of AI. I will send it out a few times a month.