About me and why I created this physics website.
Gyro Top
The figure below shows a gyro top experiencing a state of general motion. The motion is such that the vectors wn and αn are always in the XY plane, and the vectors wp and αp are always in the Z-direction.
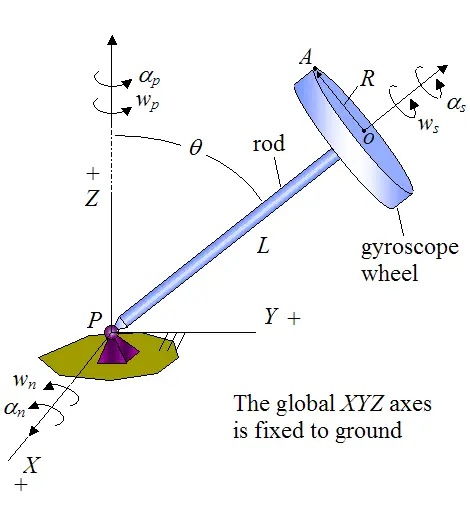
At the instant shown, determine the angular velocity and angular acceleration of the gyroscope wheel. Also, determine the velocity and acceleration of point A on the wheel.
Solution
We define the following:
At the instant shown, the unit vectors I, J, K are pointing along the positive X, Y, Z axis, respectively. In addition, these unit vectors are allowed to “move” with their corresponding angular velocity vectors (i.e. change orientation) as a way of accounting for the change in direction of each of the angular velocity vectors (ws, wp, wn), as will be shown below.
Let's find the angular acceleration of the gyroscope wheel.
To do this, it is easiest to find the angular acceleration of each angular velocity vector (and then add them together). You do this by examining how each of the angular velocity vectors (ws, wp, wn) moves, based on the kinematics of the problem.
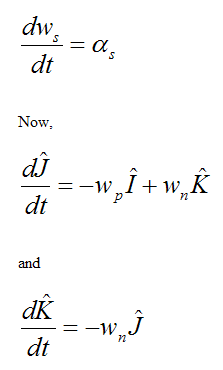
First, calculate the angular acceleration of the angular velocity vector ws. Call this vector w1.
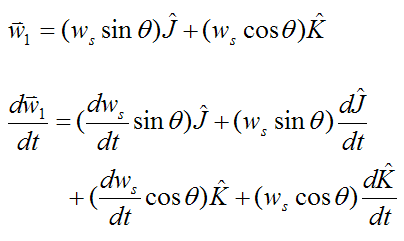
where
Second, calculate the angular acceleration of the angular velocity vector wn. Call this vector w2.

Third, calculate the angular acceleration of the angular velocity vector wp. Call this vector w3.
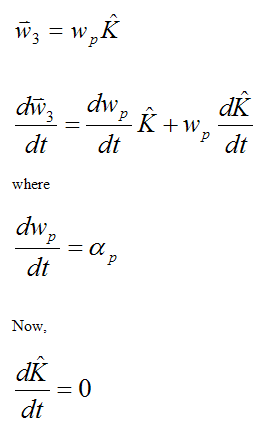
(there is no change in direction of the angular velocity vector wp).
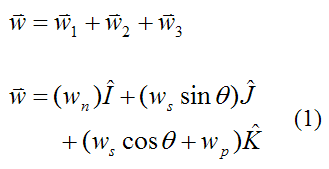
The angular velocity of the gyroscope wheel is:
The angular acceleration of the gyroscope wheel is:
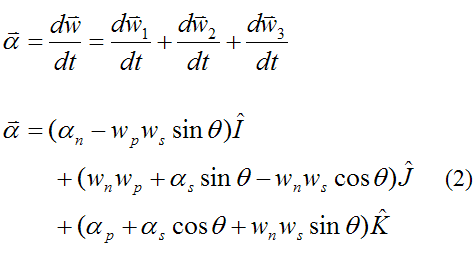
Note: The above expressions for dw1/dt, dw2/dt, and dw3/dt are evaluated using vector derivatives.
Note that we are following the right-hand rule here. If any of the vectors ws, wp, wn, αs, αp, αn are spinning in the opposite direction to that shown in the diagram, you simply change the sign of those vectors to correct for that. For example, if wn and αs are acting in the opposite direction to that shown in the diagram, you replace wn with (-wn) and αs with (-αs), in equations (1) and (2).
There are some instances where the kinematics of the problem is unknown (not prescribed as it is here), so you cannot directly calculate the angular acceleration the way it is done here. Instead you have to treat it as an unknown in the problem. For an example of this, see the physics of bowling.
Let's now determine the velocity and acceleration of point A on the gyroscope wheel at the instant shown.
The general velocity equation for point A is
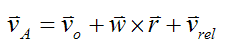
Where:
vo is the velocity of point o on the gyro top rod (this point coincides with the center of the gyroscope wheel, on the front face)
w is the angular velocity of the gyroscope wheel, given by equation (1)
r is the position vector from point o to point A
Since point A is fixed on the wheel,
Let's first determine the velocity of point o on the gyro top rod (vo), using the following general equation for velocity applied to point o:
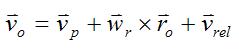
Where:
vp is the velocity of point P on the rod
wr is the angular velocity of the rod
ro is the position vector from point P to point o
Since point o is fixed on the gyro top rod,
and
Therefore, we have
Due to the kinematics of the gyro top, the angular velocity of the rod is not affected by the angular velocity of the gyroscope wheel. Therefore, the angular velocity of the rod is determined by setting ws = 0 in equation (1). This gives us
The position vector from point P to point o is

Substitute the above two equations into equation (3) to get the velocity vo.
From before, the general velocity equation for calculating the velocity of point A is
The position vector from point o to point A is

We can now calculate the velocity of point A using equation (4).
The general acceleration equation for point A is
Where:
ao is the acceleration of point o on the rod (this point coincides with the center of the gyroscope wheel, on the front face)
α is the angular acceleration of the gyroscope wheel, given by equation (2)
r is the position vector from point o to point A
Since point A is fixed on the wheel,
Let's first determine the acceleration of point o on the rod (ao), using the following general equation for acceleration applied to point o:
Where:
ap is the acceleration of point P on the rod
αr is the angular acceleration of the rod
ro is the position vector from point P to point o
wr is the angular velocity of the rod
Since point o is fixed on the rod,
and
Therefore, we have

From before, the angular velocity of the rod is
Due to the kinematics of the gyro top, the angular acceleration of the rod is not affected by the angular acceleration of the gyroscope wheel. Therefore, the angular acceleration of the rod is given by setting set ws = 0 and αs = 0 in equation (2). This gives us

From before, the position vector from point P to point o is
Substitute the above three equations into equation (5) to get the acceleration ao.
From before, the general acceleration equation for calculating the acceleration of point A is

where w is given by equation (1), and α is given by equation (2).
From before, the position vector from point o to point A is
We can now calculate the acceleration of point A using equation (6).
Note that equations (3), (4), (5), (6) use vector cross product multiplication. To evaluate the vector cross product for two general vectors A and B (relative to the XYZ frame) use the following formula:
Return to Kinematics page
Return to Real World Physics Problems home page